Magnetometer compass sensors
Magnetometers are sensors that measure the strength and direction of magnetic fields. They are commonly used in compasses to determine the orientation of an object relative to the Earth's magnetic poles. They are essential instruments in navigation, robotics, and geophysical exploration, providing accurate heading information for a wide range of applications.
- Code available:
- Magnetic field reading
- Fast SD card logging for supported hardware (ESP32, teensy 4.X)
- Communication (Mavlink, Protobuf, CAN) for supported hardware
%20--%3e%3c!DOCTYPE%20svg%20PUBLIC%20'-//W3C//DTD%20SVG%201.1//EN'%20'http://www.w3.org/Graphics/SVG/1.1/DTD/svg11.dtd'%3e%3csvg%20version='1.1'%20id='Layer_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20width='306px'%20height='344.35px'%20viewBox='0%200%20306%20344.35'%20enable-background='new%200%200%20306%20344.35'%20xml:space='preserve'%3e%3cpath%20fill='%2300599C'%20d='M302.107,258.262c2.401-4.159,3.893-8.845,3.893-13.053V99.14c0-4.208-1.49-8.893-3.892-13.052L153,172.175%20L302.107,258.262z'/%3e%3cpath%20fill='%23004482'%20d='M166.25,341.193l126.5-73.034c3.644-2.104,6.956-5.737,9.357-9.897L153,172.175L3.893,258.263%20c2.401,4.159,5.714,7.793,9.357,9.896l126.5,73.034C147.037,345.401,158.963,345.401,166.25,341.193z'/%3e%3cpath%20fill='%23659AD2'%20d='M302.108,86.087c-2.402-4.16-5.715-7.793-9.358-9.897L166.25,3.156c-7.287-4.208-19.213-4.208-26.5,0%20L13.25,76.19C5.962,80.397,0,90.725,0,99.14v146.069c0,4.208,1.491,8.894,3.893,13.053L153,172.175L302.108,86.087z'/%3e%3cg%3e%3cpath%20fill='%23FFFFFF'%20d='M153,274.175c-56.243,0-102-45.757-102-102s45.757-102,102-102c36.292,0,70.139,19.53,88.331,50.968%20l-44.143,25.544c-9.105-15.736-26.038-25.512-44.188-25.512c-28.122,0-51,22.878-51,51c0,28.121,22.878,51,51,51%20c18.152,0,35.085-9.776,44.191-25.515l44.143,25.543C223.142,254.644,189.294,274.175,153,274.175z'/%3e%3c/g%3e%3cg%3e%3cpolygon%20fill='%23FFFFFF'%20points='255,166.508%20243.666,166.508%20243.666,155.175%20232.334,155.175%20232.334,166.508%20221,166.508%20221,177.841%20232.334,177.841%20232.334,189.175%20243.666,189.175%20243.666,177.841%20255,177.841%20'/%3e%3c/g%3e%3cg%3e%3cpolygon%20fill='%23FFFFFF'%20points='297.5,166.508%20286.166,166.508%20286.166,155.175%20274.834,155.175%20274.834,166.508%20263.5,166.508%20263.5,177.841%20274.834,177.841%20274.834,189.175%20286.166,189.175%20286.166,177.841%20297.5,177.841%20'/%3e%3c/g%3e%3c/svg%3e)


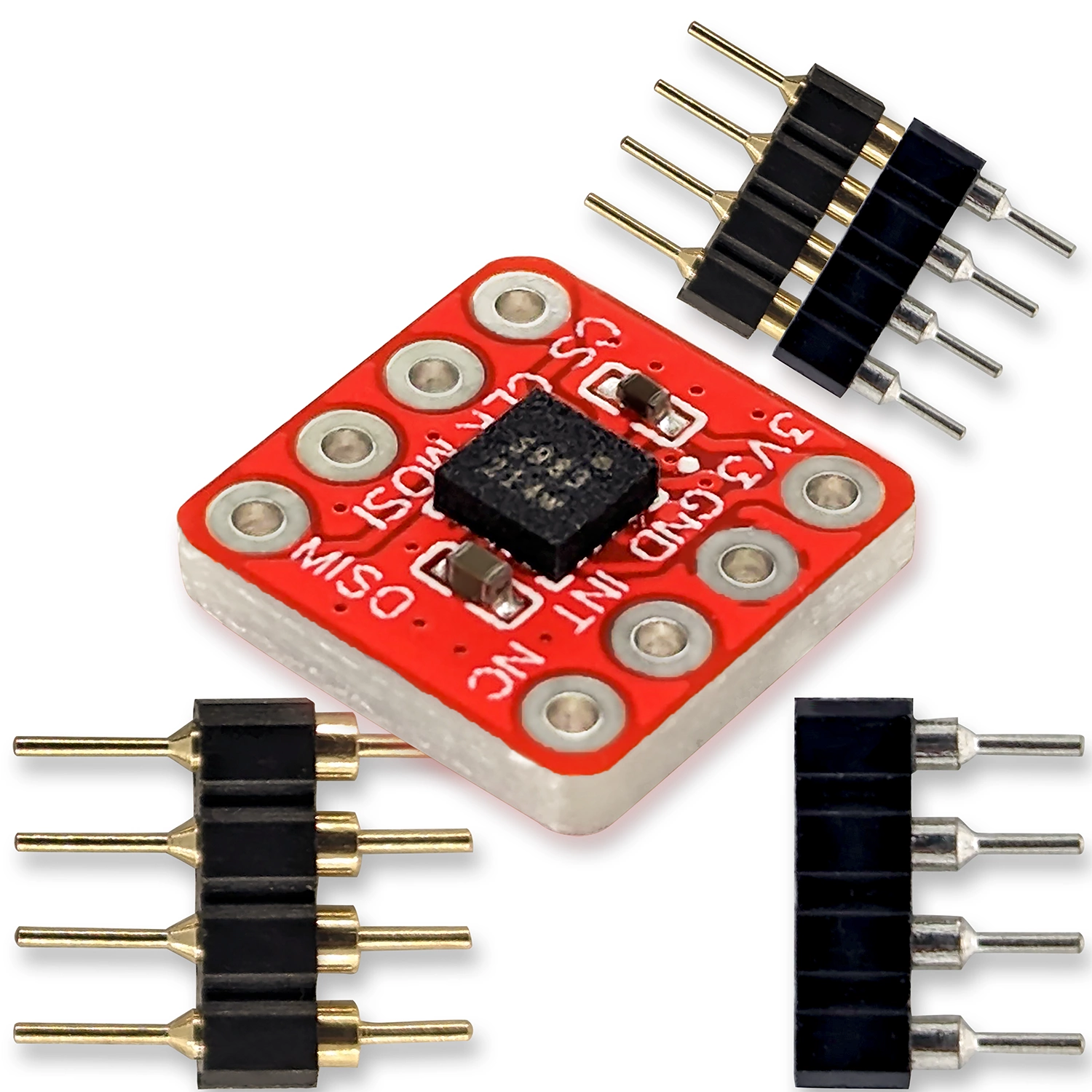
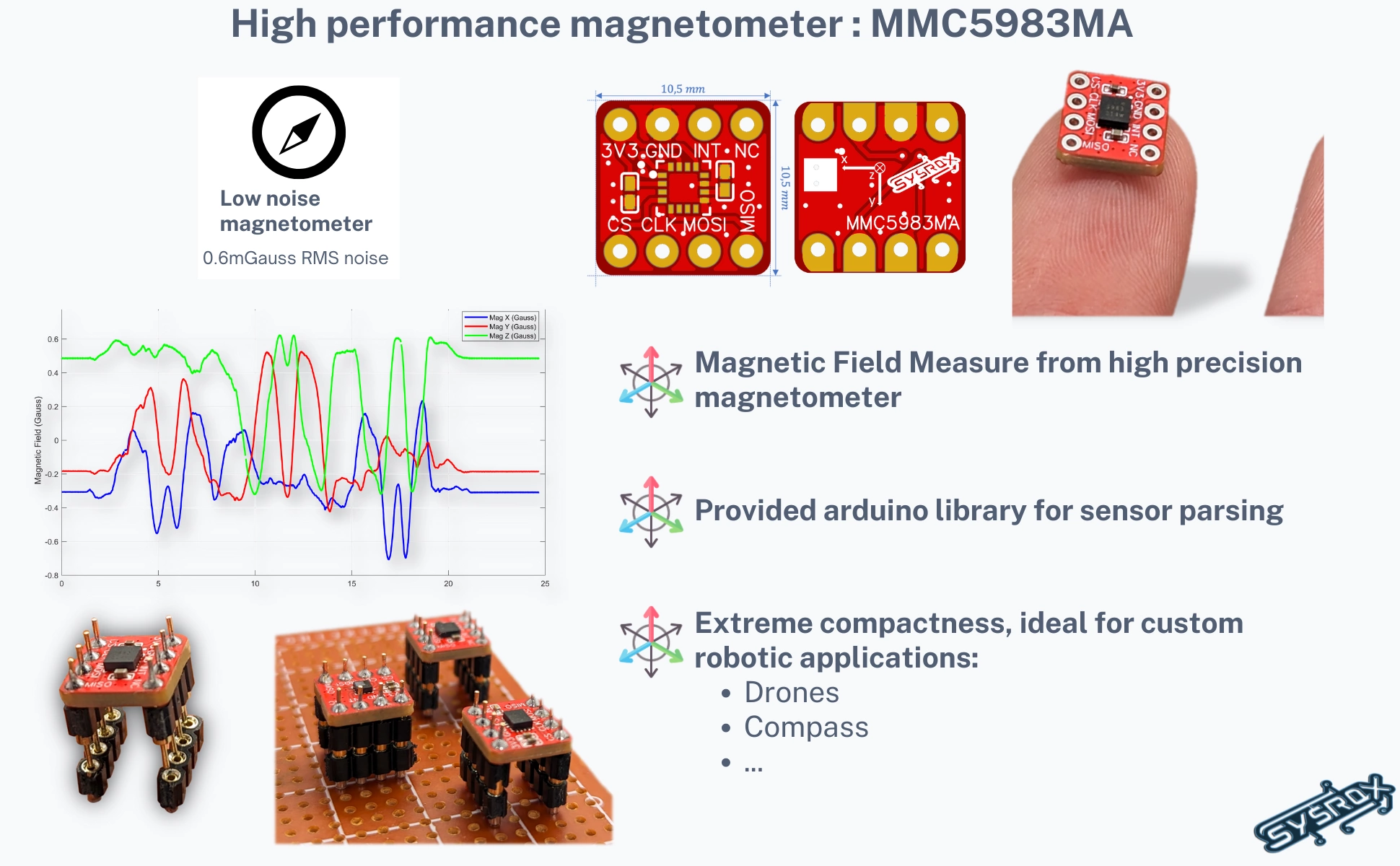
Nano Sensor: 3-axis Magnetometer High-Performance Compass 0.5° Precise Heading Measurement SPI Communication for Arduino or Raspberry
Ultra compact breakout board featuring best consumer grade magnetometer from Memsic mmc5983ma
General FAQ
How are designed sensor boards?
Sensors are chosen based on their low noise level, low drift, high resolution and are integrated in the most convenient form factor for robotic applications development. If the board contains multiple sensors they are linked by a unique high speed SPI bus.
Are devices 5V tolerant?
No. Except if specified, all devices only supports 3.3V for power supply and communication, which allow more compact designs.
Do all devices come with software support?
Yes. Codebase is organised as libraries and applications linked by a manifest file. A project is composed by an application and necessary libraries. All sensors boards come with a C++ parsing library at minimum. 6dof and 10dof devices come with a sensors fusion code. All code is fully tunable and easy to integrate in your project.
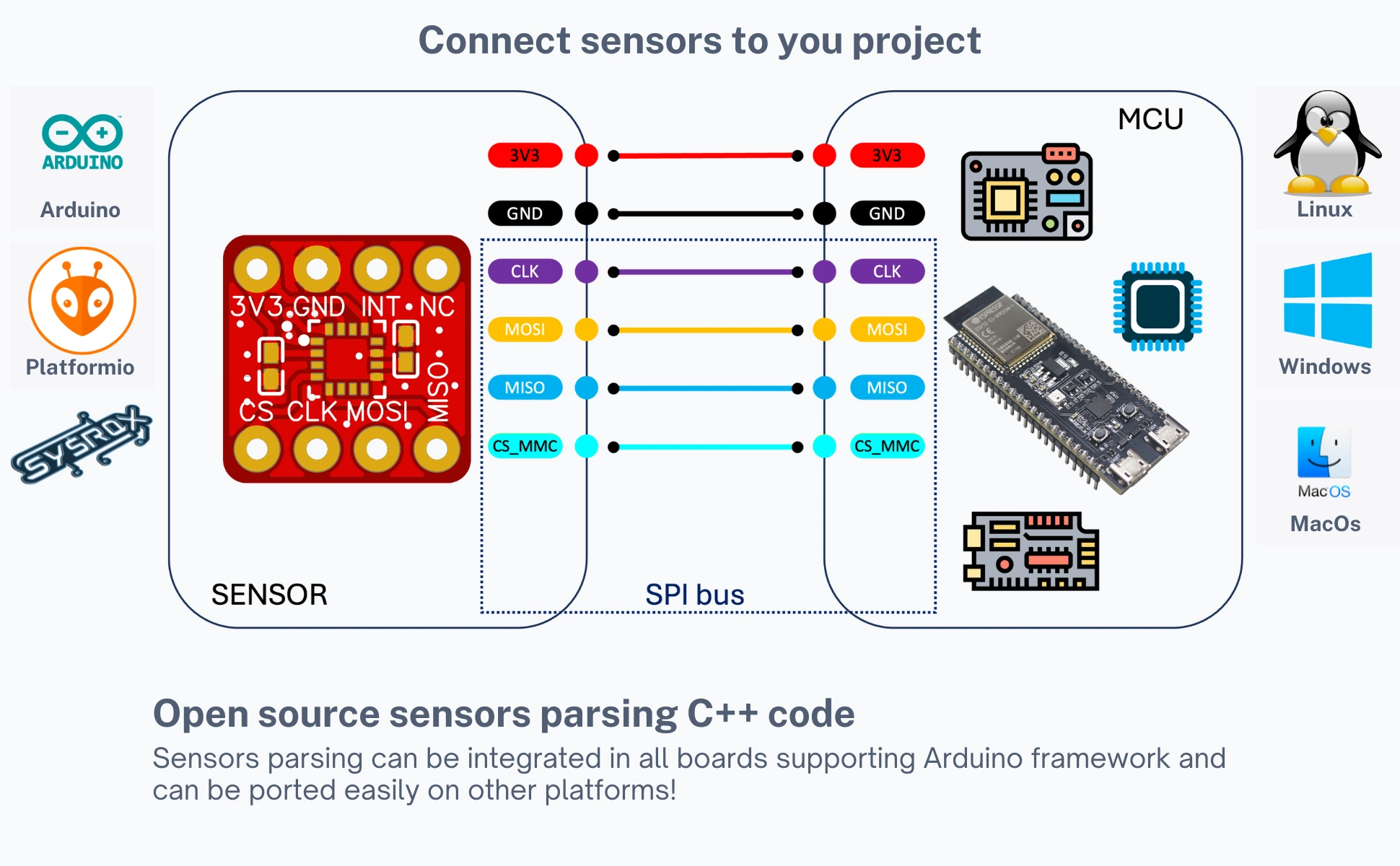
What is supported hardware for C++ libraries?
All boards supporting Arduino Framework should be compatible with sensors parsing libraries. Some functionalities are only available on specific hardware like CAN communication (ESP32 only), logging (ESP32 and teensy 4.X)... Sensors fusion is hardware agnostic and should supported on all platforms. As it is distributed as precompiled .a file, do not hesitate to Contact US if you need support for a specific platform.
What are the requirements for 10dof sensors fusion?
As the fusion algorithm is based on an Extended Kalman Filter, it requires high computational power. It is recommended to use a microcontroller with a FPU (Floating Point Unit) like ESP32 or Teensy 4.X. Generally we recommend to use a microcontroller with at least the computational power of one ESP32 core.
What does include documentation?
The documentation includes a quick start guide for every device. For each library a detailed API documentation is provided with examples of how to use it with any project. For sensors fusion, a detailed explanation of the algorithm is provided and a tuning guide is proposed.
Where are devices with included microcontrollers?
These boards are currently tested and should be available in the near future. 2 models are currently developped featuring a dual core ESP32-S3 with wifi and bluetooth capabilities. The most advanced model will include CAN transceiver, GPS module with antenna, SD card slot and advanced power management.